Steuern und regeln mit Fuzzy-Logik
Grundlegendes-
Die Fuzzy-Logik kommt vorzugsweise dann zur Anwendung, wenn ein technischer Prozess mit mehreren Ein- und Ausgangsgrößen sich möglichst selbständig steuern soll.
Seit den 1990er Jahren werden in Europa sog. Fuzzy-Controller eingesetzt. Anwendung finden sie in industriellen Prozessen, auch bei Kfz-Automatikgetrieben, Unterhaltungselektronik und sogar in Waschmaschine, Geschirrspüler und Staubsauger.
- Fuzzifizierung
Zunächst werden die Eingangswerte (scharfe Mengen) der Eingangsgrößen (linguistische Variablen) unscharfen Mengen (Fuzzy-Sets) zugeordnet.
In der Regel begnügt man sich mit drei Fuzzy-Sets pro Variable - z.B. "schwach" - "mittel" - "stark" - Steuer- oder Regelbasis
In der Steuer- oder Regelbasis kommt nun das Expertenwissen zum Einsatz:
Jedes definierte Fuzzy-Set der Eingangsvariablen wird durch subjektive logische Aussagen mit den Fuzzy-Sets der Ausgangsvariablen verknüpft.
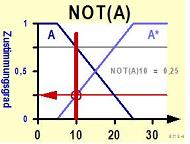
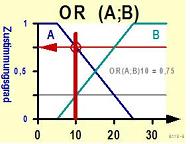
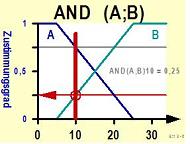
Möglich sind grundsätzlich alle logischen Argumente wie UND, ODER, NICHT.
Allerdings ist die Fuzzylogik anders als die herkömmliche zweiwertige Logik zu betrachten: Siehe rechts! - Defuzzifizierung
Da zum Beispiel ein Automatikgetriebe mit Begriffen wie "schwach", "mittel", "stark" nichts anfangen kann, muss nun wieder eine definierte Steuergröße erzeugt werden.
Dies geschieht durch verschiedene Defuzzyfizierungsmethoden.
Am häufigsten werden die Schwerpunkt- oder die Näherungs-Schwerpunktmethode angewandt.
= A wenn A>B
= B wenn A<=B
= A wenn A kleiner B
= B wenn A>=B